
Специалисты Роскосмоса освоили экспериментальное производство действующих образцов микроробототехнической шагающей платформы для работы в космосе. Об этом сообщается в пресс-релизе холдинга «Российские космические системы», поступившем в редакцию «Ленты.ру».
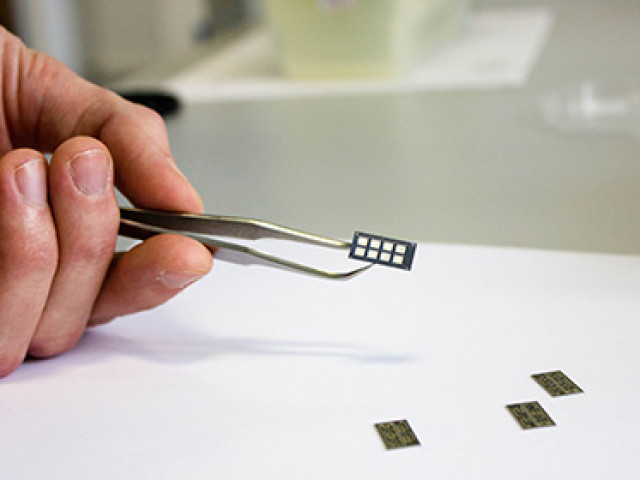
Шагающее движение робота происходит за счет программируемой деформации «ножек». При нагреве от подачи напряжения «ножка» разгибается в заранее определенных местах, а при охлаждении сгибается. При весе 70 миллиграммов подвижная платформа может удерживать нагрузку в 20 раз больше, а перемещать — в пять раз больше собственного веса. Скорость его движения составляет около 14 миллиметров в минуту.
Прототип микроробота может работать в диапазоне температур от минус 200 до плюс 200 градусов Цельсия при отсутствии земной атмосферы, а также устойчив к радиации и воздействию атомарного кислорода в открытом космосе. В «Российских космических системах» над подобными устройствами работают с 2008 года.
«Вся подвижная платформа — это одна многослойная деталь, технология производства которой похожа на изготовление микросхемы. Это единый технологический процесс без сборочных операций. В основе устройства всего два материала — кремний и полиимид, которые мы получаем от российских поставщиков», — сказал руководитель сектора микромеханики «Российских космических систем» Игорь Смирнов.
В отличие от создаваемых в мире аналогов, концепция российского микроробота на основе разработанной платформы сможет перемещаться по шершавым, ступенчатым и наклонным поверхностям. Разработка станет основой при создании перспективных автономных микроробототехнических устройств для инспекции труднодоступных областей на поверхности и во внутренних отсеках космических аппаратов, а также позиционирования различных модулей космических аппаратов.


