
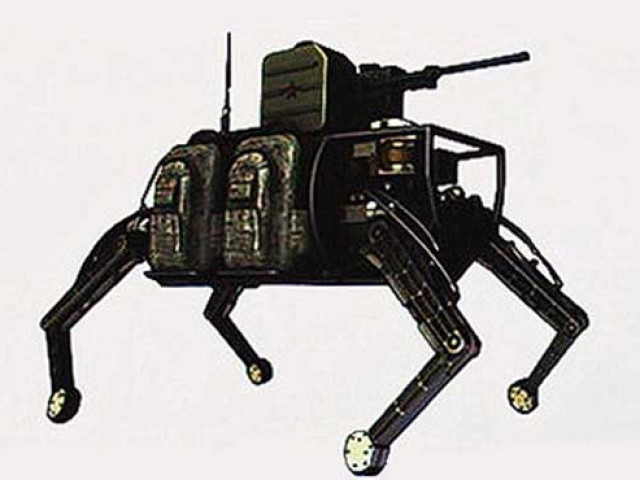
В России в настоящее время продолжается разработка "звероподобного" боевого робота "Рысь". Головным предприятием по данной теме является ВНИИ "Сигнал" из города Ковров. Благодаря gurkhan.blogspot.ru, сегодня впервые можно увидеть, как выглядит биоморфный боевой робот "Рысь".
По данным, получившим огласку при оформлении госзакупки, стало известно, что "Рысь" будет иметь сразу 6 вариантов функционального исполнения:
-Робот разведки и наблюдения;
-Робот огневой поддержки подразделений;
-Робот разведки и уничтожения минно-взрывных устройств;
-Робот эвакуации раненых с поля боя;
-Робот доставки боеприпасов и снаряжения;
-Робот инженерной разведки.
В состав биоморфного робота входят бортовая информационно-управляющая система, аппаратура управления движением, аппаратура технического зрения, аппаратура передачи данных и команд управления, аппаратура навигации и ориентации, средства разведки и наблюдения, аппаратура слежения за маяком, программный комплекс, а также целевая нагрузка, определяемая функциональным назначением.
"Рысь" должна двигаться в условиях городской инфраструктуры по бетонным, асфальтовым, мраморным, деревянным и грунтовым площадкам и площадкам с песчаным покрытием глубиной до 100 мм; по пересеченной и сильно пересеченной местности, в гололедицу, по опавшим листьям, по траве высотой до 1 м, снегу глубиной до 400 мм, в дождь, по залитым водой поверхностям глубиной до 400 мм; по горной местности и разрушенной городской инфраструктуре, на промышленных предприятиях, в производственных и жилых помещениях, преодолевая пороги высотой до 500 мм, лестничные марши с углом наклона до 30° и высотой ступени до 200 мм, рвы шириной до полуметра, стенки высотой до 400 мм и шириной до 300 мм.
При этом будет обеспечиваться устойчивое движение сохранением исходного положения платформы. Разворачиваться "Рысь" будет на пятачке не более метра. Планируется что робот должен будет выдерживать отдачу размещаемого на нем оружия: пулемета калибра 7,62мм ПКТ, ракет, РПГ, РШГ, а также противостоять иным внешним силовым воздействиям, например, ударам или попыткам повалить его на бок.

Из интересных особенностей обеспечение движения по поверхности с низкой несущей способностью грунта: супеси, насыщенные влагой, заболоченные участки. Как настоящее животное, "Рысь" умеет ложиться и вставать по команде. Может следовать за поводырем (маяком). Вообще, кроме следования "на привязи", предусмотрено ручное дистанционное управление, полуавтономное, а также полностью автономное существование, при котором благодаря искусственному интеллекту "Рысь" сама будет планировать оптимальный маршрут.
Во многом российский биоморфный робот похож на своего американского собрата – робота BigDog, разработанному Boston Dynamics совместно с Foster-Miller на деньги выделяемые DARPA.
Однако, американский "пёсик", не смотря на свой приоритет, получился меньше и легче российского. Его возможности как по передвижению, так и по нагрузке гораздо скромнее "Рыси". Максимум, на что он был способен – переносить снаряжение и вести наблюдение. Задачи боевого использования там не ставились изначально. Всё, чего удалось достичь конструкторам из Boston Dynamics – это обеспечение возможности робота ходить по ледяной поверхности и восстанавливать равновесие после удара сбоку.
В конце ноября 2015 года компания заявила, что прекращает дальнейшие работы по развитию BigDog. Были названы две главные причины: ограниченные возможности робота и слишком громкий демаскирующий шум, с которым так и не удалось справиться разработчикам. В связи с этим компания переключилась на робота Spot — это меньший вариант BigDog, который работает на тихом электродвигателе и, как заявляется, более ловкий. Однако и у "Рыси" будет "меньшой брат". Опытно-конструкторская работа наряду с созданием биоморфной платформы общей грузоподъемностью 400 кг, предусматривает так же создание более малогабаритного образца, весом в 100 кг. Соисполнителем работ выступает компания "Андроидная техника", которая непосредственно проектирует платформенный каркас. Планируется, что оба биоморфных робота – большой и малый, выйдут на государственные испытания в первом полугодии 2019 года.


